What is Xtend?
This was a university project where the goal of the project was to design and develop a controller to easily navigate a Jenga robot to push Jenga blocks out of the Jenga tower. Xtend is a one-hand controller optimized to control each level of freedom of the robot with one finger. The goal of the project was to get an idea of how physical interfaces present different challenges than digital interfaces. We needed to get an idea of how affordance can allow users to understand which button triggers which function.
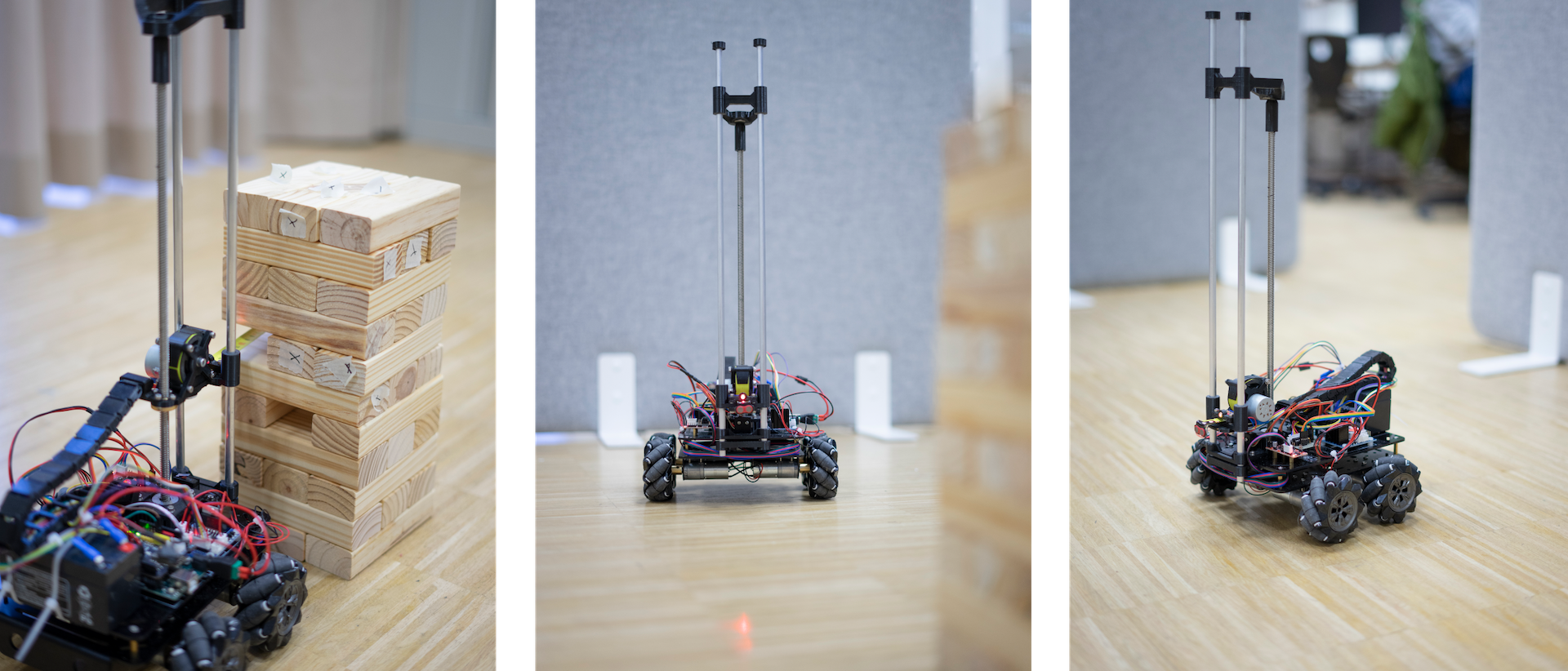
The robot
The robot was not built by us, it was given to us by our professors at the university. So we had to build every function of the robot into a controller. The robot has several functions: Thanks to special wheels, the robot has the ability to move not only forward and backward, but also sideways and rotate around its own axis. The built-in measuring wheel is there to push out the bricks. So the measuring wheel is able to go up and down and push out and go back in.
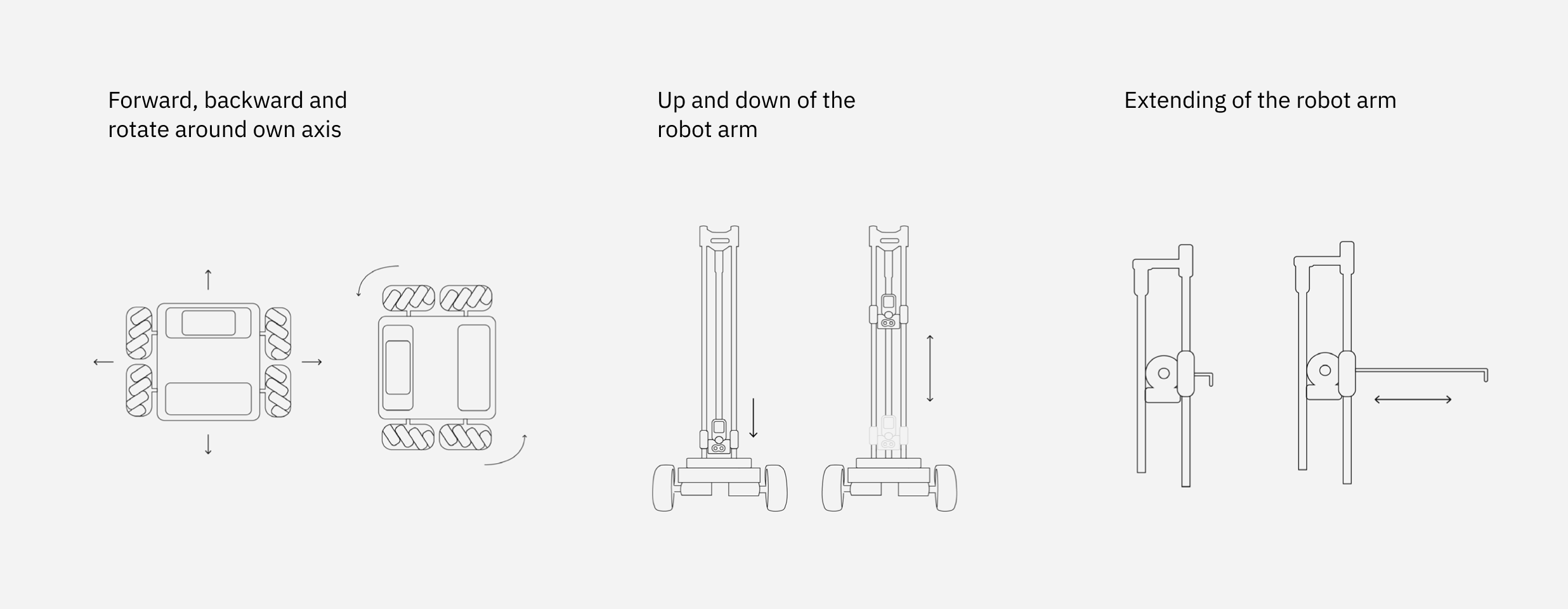
movement of the robot
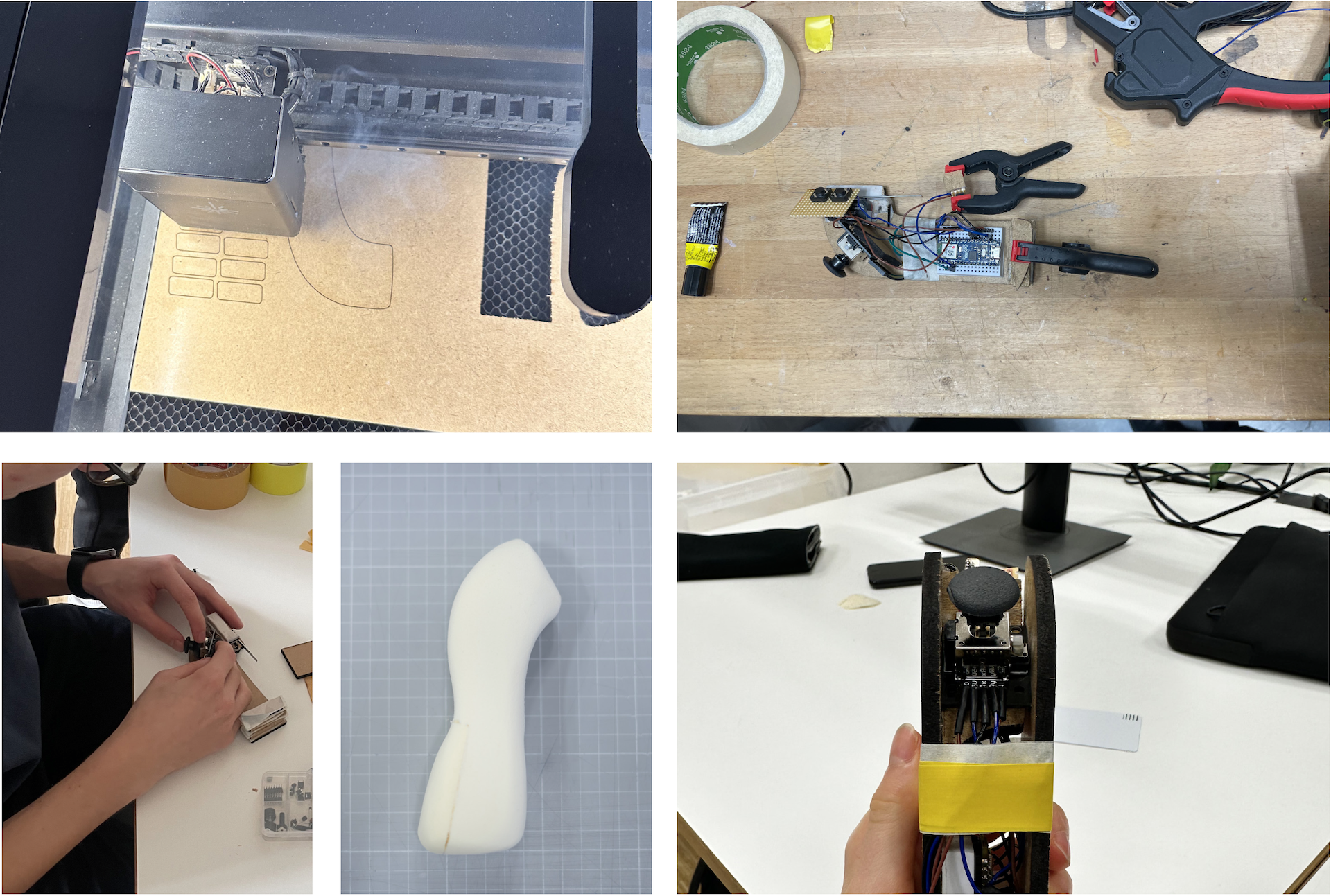
Prototype
Xtend
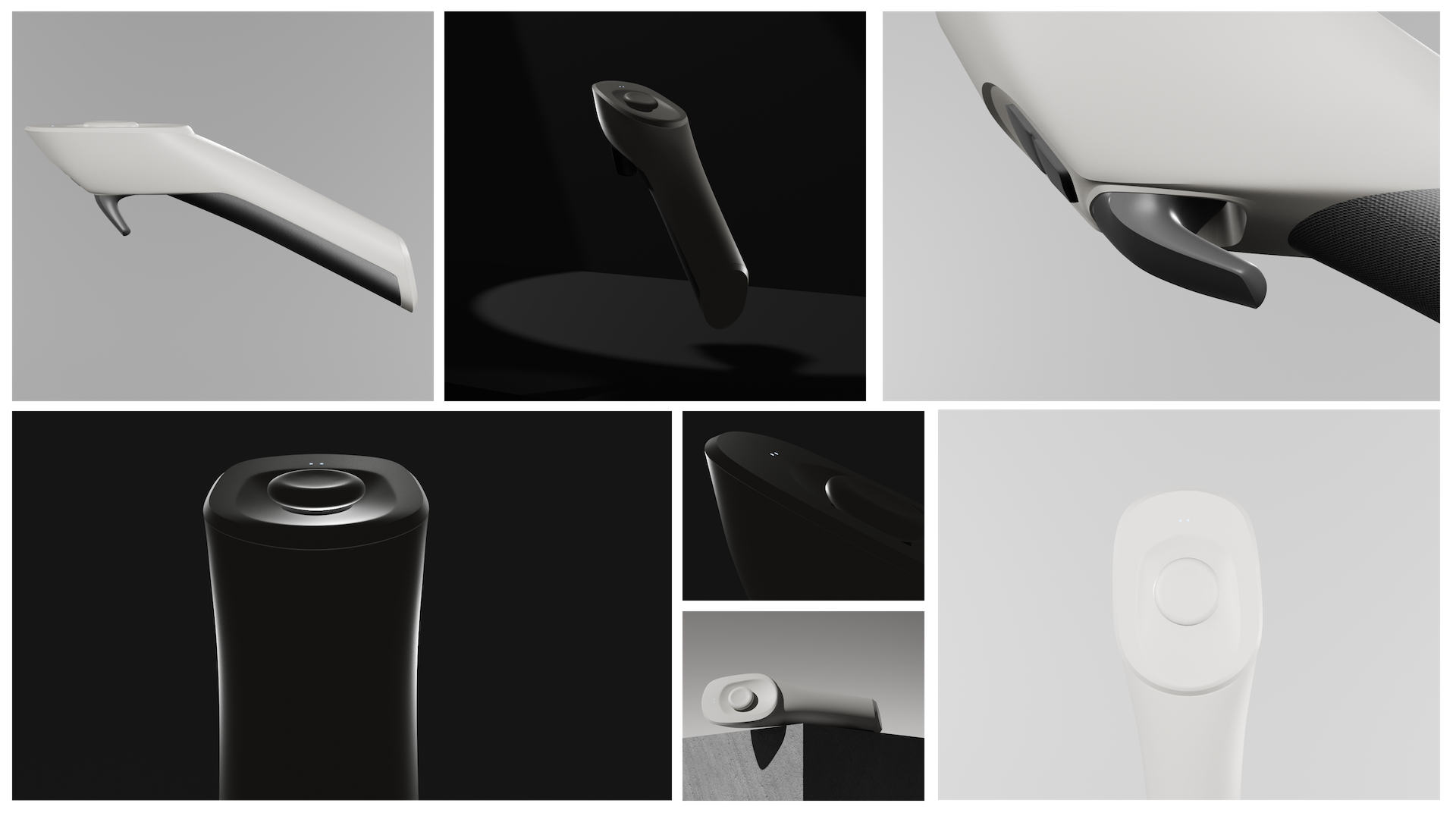
This is Xtend

© 2026 Tim Bluthardt